代客泊出
驾驶员可以通过 AVP 代客泊出功能,将车辆从车位泊出并沿着系统规划的路线行驶至园区或停车场出口。AVP 也支持从当前车位泊出至其他空车位。
 方法
方法
驾驶员打开 ADS 应用,系统将推荐泊出至园区出口的导航路线。
如未收到系统推荐的泊车路线,驾驶员也可通过打开 ADS 应用,点触
 进入 AVP
界面。选择某个园区或停车场出口,或点选图上某一目标车位,点触“去这里”发起到出口位置或目标车位的导航。
进入 AVP
界面。选择某个园区或停车场出口,或点选图上某一目标车位,点触“去这里”发起到出口位置或目标车位的导航。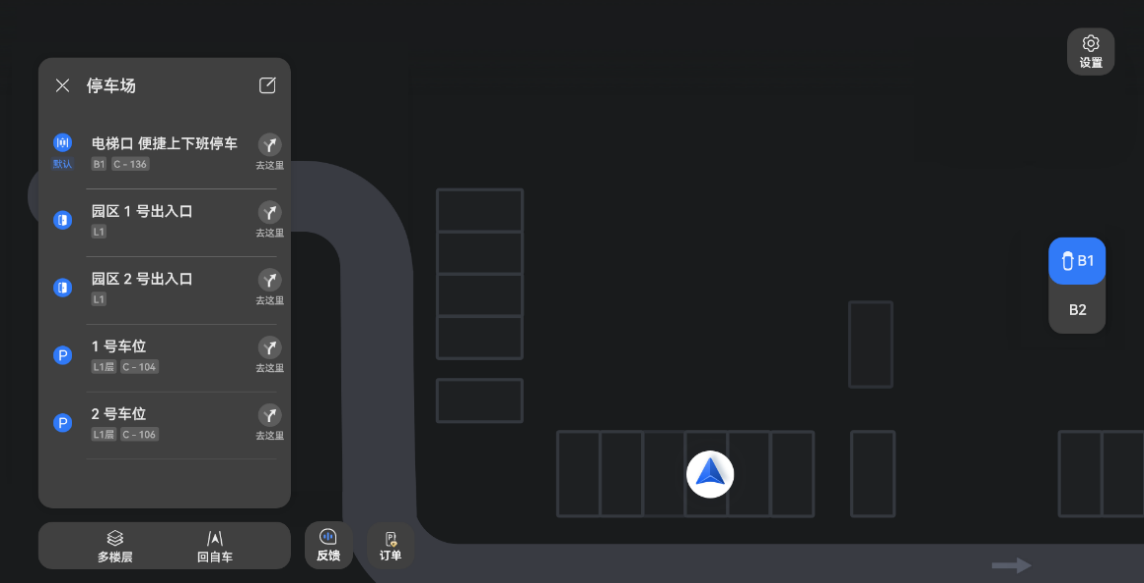
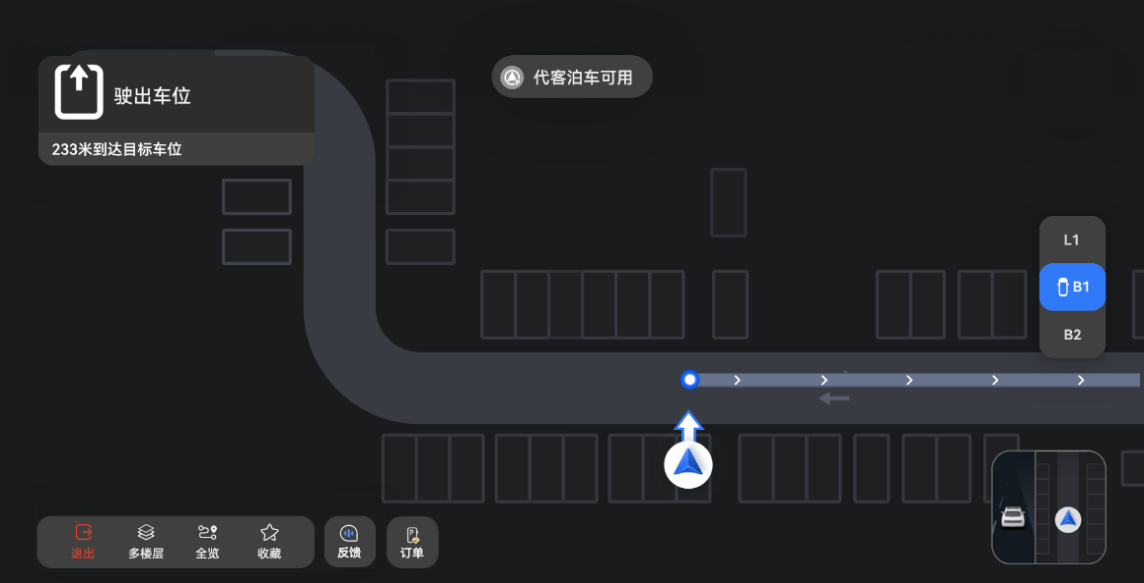
观察到中控屏显示
 代客泊车可用提示。
代客泊车可用提示。驾驶员在驾驶位,连续下拨两次换挡手柄,激活 AVP 功能。
激活 AVP 功能时,请驾驶员始终在驾驶位并系好安全带,否则 AVP 功能无法激活。
激活成功后,车辆将泊出车位并沿着系统规划的泊车路线行驶,泊出至园区或停车场出口,或泊出至目标车位。
在使用 AVP 行驶过程中,驾驶员也可以手动调整 AVP 巡航的目标车速,具体操作方法请参阅调节目标车速。园区道路可调节的目标车速范围为 5 km/h ~ 30 km/h,地下停车场可调节的目标车速范围为 5 km/h ~ 20 km/h。
当车辆即将到达目标位置时,请驾驶员及时接管车辆。