车道巡航辅助系统简称LCC。LCC通过安装在车辆前部的毫米波雷达传感器和前风窗玻璃上的摄像头,探测前方路径上的车辆与本车之间的相对距离和速度,以及路面上的车道标志线。在巡航时自动调节与前方车辆间的距离,并将车辆保持在车道中间。可设置的巡航车速(15~130)km/h。
提示:
- 毫米波雷达和前向摄像头使用的注意事项,请参阅毫米波雷达和前向摄像头章节。
仪表显示界面
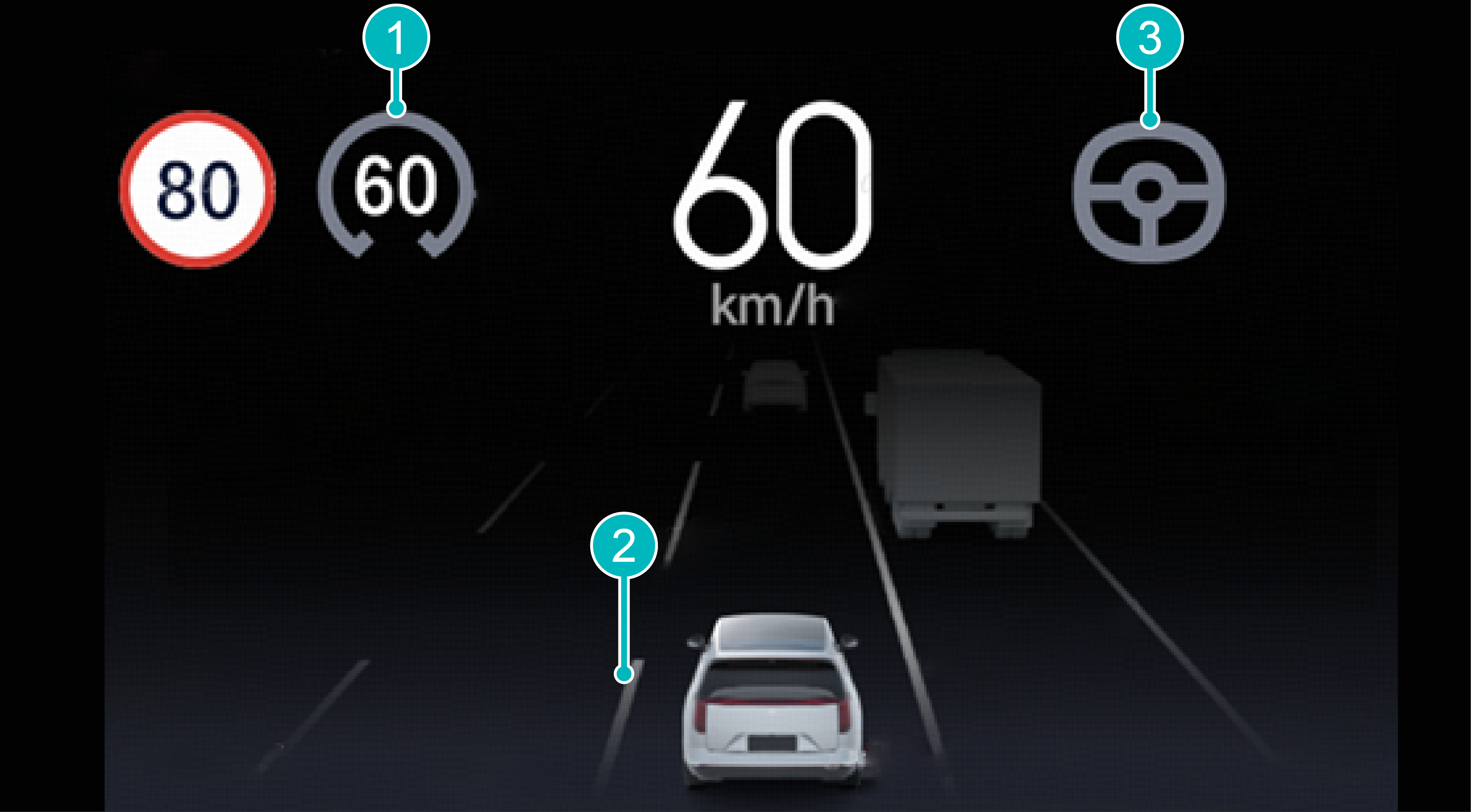
①设定的巡航车速:
- 当系统满足激活条件、驾驶员未激活巡航时,巡航车速显示为灰色,当驾驶员激活巡航后,巡航车速显示为蓝色。
②车道标志线:
- 当系统激活后,仪表内会高亮显示车道标志线。
③LCC状态显示:
-
当系统综合探测到当前道路环境、车辆状态和驾驶员行为满足开启条件时,系统将进入准备状态
 ,组合仪表灰色指示灯点亮。
,组合仪表灰色指示灯点亮。
-
当系统进入激活状态后,组合仪表蓝色
 指示灯点亮,此时系统将结合驾驶员行为进行适当的横纵向辅助控制。
指示灯点亮,此时系统将结合驾驶员行为进行适当的横纵向辅助控制。
-
当系统判定驾驶员有转向干预的行为时,组合仪表蓝色
指示灯点亮并闪烁,以提醒驾驶员此时系统已断开横向辅助控制。
开启LCC
- 挡位置于“D”挡,将电子怀挡向“D”挡方向快速拨动2次,开启LCC。
- 挡位置于“D”挡,将电子怀挡向“D”挡方向拨动一次后再次拨动并保持,开启LCC,并将车速恢复至上一次的目标巡航车速。
退出LCC
在巡航状态下,踩下制动踏板到一定深度或将电子怀挡向“R”挡方向拨动1次,退出车辆巡航状态。
手握方向盘检测
当LCC激活后,若检测到驾驶员有双手离开方向盘的行为,系统将进行声音和视觉的逐级提醒。
注意:
- 当驾驶员对系统提示不予响应,仍然长期双手离开方向盘情况下,系统将进行安全停车行为。在安全停车行为过程中,系统将控制车辆持续减速到静止状态、危险警告灯点亮。请驾驶员务必不要惊慌,及时通过转向、踩踏制动踏板控制即可。
横纵向控制
LCC功能激活后,系统会在纵向保持车速或保持与前车距离外使车辆保持在车道中央行驶。包括但不限于以下情况,LCC功能会退出或无法使用:
- 车道标志线曲率过大、双侧车道标志线长时间丢失、单侧车道标志线丢失一定时间后,车道宽度过宽或过窄等。
- 开启转向灯。
- 驾驶员较大转向力控制方向盘。
- 驾驶员踩下制动踏板。
- 驾驶员打开主驾车门、前舱盖、行李箱,解开安全带。
- 驾驶员切换挡位至非前进挡。
- 驾驶员施加驻车制动或操作电子怀挡退出功能。
- 有更高优先级的功能(如紧急车道保持等主动安全功能)触发。
- 防抱死制动系统(ABS)激活。
- 牵引力控制系统(TCS)激活。
- 车辆出现严重压线行为。
- 车辆行驶速度不符合系统设计要求。
- 雨刮长期处于快速挡位。
- 传感器被遮挡。
- 系统发生故障。
功能局限性
LCC系统存在一定的局限性,LCC系统有关纵向控制的局限性请参考ACC自适应巡航有关描述,而其横向控制可能会因错误地探测车道标志线或探测不到车道标志线出现异常方向盘控制。包括但不局限于以下情况,系统的横向控制可能会受影响、误作用或不起作用,即使功能被开启并显示已经激活:
-
传感器检测受限场景:
- 摄像头检测受限的场景,如安装位置变更、风窗玻璃脏污、破损、起雾、摄像头区域有遮挡物、前方车辆扬起的水花或尘土等。
- 雷达检测受限的场景,如安装位置变更、雷达被遮挡等。
- 恶劣天气场景,如暴雨、大雪、沙尘暴、浓雾、雾霾、扬尘等。
- 光照强度发生突变的场景,如阳光直射、对向来车的车灯照射、道路积水反光、进出隧道等。
- 光照强度不良的场景,如黎明、黄昏、黑暗的隧道内、夜间无路灯照明的道路。
-
前方物体属于难例场景(车辆在行驶中可能遇到的极端或复杂情况):
- 施工路段的设施,如隔离柱、水马、道路护栏等。
- 不规则的临时性障碍物,如路面掉落的物体、事故侧翻的车辆、临时放置的三脚架。
- 异型车辆,如装载草垛的大卡车、搅拌车、渣土车等。
- 动物、横穿行人、横置/斜置车辆、两轮车等场景。
-
道路环境复杂场景:
- 没有车道标志线或车道标志线磨损、被覆盖、交叠、颜色特殊的场景,如无车道标志线的十字路口、道路分岔口、道路汇合口等。
- 车道过宽或过窄的场景。
- 车辆高速通过大曲率弯道的场景。
- 车辆行驶区域纵坡或横坡过大的场景。
- 车辆行驶区域车道数增多或减少的场景。
- 道路上有类似车道标志线的标记或物体等影响感知识别的场景,如刹车痕、道路接缝、道路指示标线等;隔离带、道路护栏、高架桥或其他物体在车道标志线附近的投影等。
- 与前车距离过近或前车压线行驶挡住车道标志线的场景。
- 道路颠簸导致车辆严重摇晃的场景。
- 道路湿滑、结冰、积水、横风等导致车辆行驶状态不稳定的场景。
- 前方车辆行驶状态突然改变的场景,如急加速、急减速等。
- 侧前方车辆突然近距离切入到自车前方,或自车突然近距离切入侧前方车辆后方的场景。
- 自车高速驶向前方静止或缓行的目标的场景。
-
其他影响系统控制性能的场景:
- 车辆超载行驶。
- 车辆维护不当,如制动器或轮胎过度磨损、胎压异常、四轮定位异常等。
- 驾驶员对车辆进行改装,如更换转向器、ESP车身电子稳定系统等执行相关的零部件,对前保险杠喷涂车漆,导致前向雷达性能下降等。
警告:
- 车道巡航辅助仅是驾驶辅助功能,无法应对所有道路、交通与天气状况,驾驶员对驾驶始终负有全部责任,应始终注意路况并主动控制车辆。
- 驾驶员务必始终手握方向盘,主动控制车辆。在LCC系统未提供适当的转向辅助或适当的车间距离时,驾驶员应及时干预。
- LCC系统使用不当或疏忽大意可能引发事故,因此驾驶员应始终控制车辆,保持适当的车速与车间距离,保持车辆正确行驶在车道内,即使正在使用车道巡航辅助系统。
- LCC系统不是碰撞避免系统,当系统未做出适当的控制时,驾驶员必须介入。
- 在城市交通、交叉路口、积水积雪路面、恶劣天气、山路、起伏路、高速公路进出口等情况下,请勿使用车道巡航辅助功能。
- LCC系统并非总能识别车道标志线,某些情况下可能漏识别或误识别车道标志线,因此LCC系统可能在需要时不产生横向辅助,也可能误产生不必要的横向辅助。
- LCC系统仅能使用有限的车辆转向系统能力,所以并不能覆盖所有驾驶工况。驾驶员务必时刻保持双手把控方向盘,注意小心驾驶。在高速弯道中注意手扶方向盘或适当降低车速。
- LCC系统无法针对行人、动物、异物、低平台拖车或迎面来车等执行制动。
- LCC系统并不对所有交通状况起作用,在急弯前车道标志线曲率过高、遇到无车道标志线路段等工况下,横向辅助可能突然退出。务必始终手握方向盘,主动控制车辆。
- 驾驶员接收到手握方向盘检测提示时,应立即手握方向盘,请切莫慌张或不必要地猛打方向。
注意:
- 使用LCC时,仪表提示“巡航辅助暂不可用”,表示驾驶辅助系统存在故障,建议联系售后检修。
提示:
- LCC系统可能将驾驶员手轻放在方向盘上的情况误判为双手脱离方向盘。
- LCC系统若因故抑制,在工作条件满足时会自动恢复。
- 当驾驶员判断LCC系统对车辆的控制不当时,抓稳方向盘进行适当控制,LCC功能可被驾驶员操作方向盘中断。
- LCC系统在控制方向盘进行辅助时,驾驶员仍可转动方向盘操控车辆。在驾驶员判断系统所施加的纠偏力矩不当时,可随时控制车辆按驾驶员意图行驶。