融合泊车系统能够通过车辆周围的超声波传感器和全景摄像头,自动搜索车辆左/右侧的停车位信息,探测车辆周围的车辆、行人、障碍物等。
融合泊车系统可以自动规划并计算泊车轨迹,同时控制车辆的转向、车速、挡位等使车辆自动泊入停车位或自动泊出停车位。
- 使用融合泊车系统前请仔细阅读本使用说明书。
- 本系统仅提供驾驶辅助功能,不能替代驾驶员进行泊车,驾驶员仍需要对安全驾驶负全部责任。
- 请确保在不违反道路交通法规的前提下使用本系统。
- 使用本系统时,请寻找合法、合适和安全的停放位置。
- 本系统并非总能检测到停车位上的物体,请务必目视检查,确认停车位合适且安全。
- 本系统并非总能检测到车辆、行人和障碍物等;对于突然闯入的车辆、行人及其他运动物体,系统也存在不能及时刹停的风险。因此驾驶员使用本系统期间,应时刻注意观察车辆周边环境,随时准备接管车辆,确保安全驾驶。
- 车辆仅前后方安装了雷达,车辆侧边是探测盲区,若障碍物进入车辆侧边,本系统无法探测到,需要驾驶员主动观察,若有碰撞危险需要驾驶员及时接管车辆。
- 使用本系统期间,驾驶员应注意车辆运行轨迹切换,避免车辆与行人等发生碰撞。
包括但不限于以下情况,融合泊车系统可能存在安全风险,无法正常操作:
- 狭窄停车位。
- 停车位内存在以下物体:不能较好反射超声波传感器信号的物体、不在超声波传感器探测范围的物体,如柱类物体、尖细物体、条状片状物体、悬空物体及低矮物体如地锁等。
- 道路坡度较大。
- 能见度差(如夜晚、大雨、大雪、浓雾等造成)。
- 路沿高度较低时,本系统可能无法检测到路沿。
- 一个或者多个超声波传感器或全景摄像头污损或受到阻碍(如污泥或者冰雪覆盖等)。
- 天气条件(如大雨、雪、雾、酷热或者极寒温度等)干扰超声波雷达和全景摄像头工作。
- 传感器受其他可产生超声波的电气设备或者装置的影响。
- 轮胎胎压过高或过低。
- 车位线不清晰或者与地面的对比度不明显时,本系统可能无法识别车位。
- 车辆行驶通道较窄时,本系统可能无法识别车位。
- 车位内有车辆/其他障碍物但位置比较靠里时,本系统可能会误识别为可停车位。
- 车辆无法识别坑洼路面。
- 对车辆进行非正规地拆卸、改装。
- 车辆安装使用防滑链或使用备胎。
- 车辆安装拖车钩。
- 车辆装载物品超出车辆尺寸。
- 注意:以上未尽述所有限制条件。
- 泊车开始后,注意不能触碰方向盘或者换挡杆,否则融合泊车系统将退出。
- 本系统激活过程中,请根据中控屏幕提示进行泊车操作。
- 车速超过20km/h时,本系统不能正确搜索车位。
- 本系统并非总能完全搜索到车位或者完全能泊车成功,若未搜索到车位或者未泊车成功,可以重新开启融合泊车系统尝试泊车。
- 由于车辆存在机械间隙、胎压差异等影响控制精度的因素,因此每次泊入/泊出的最终位置会有一定误差。
故障/中断问题解决:
- 车辆故障或中断后,正常情况可以重新进入融合泊车系统使用功能。
- 部分情况,车辆须熄火后重启。如车辆各系统冷却后重启,仍无法进入融合泊车系统,请前往广汽传祺授权新能源服务中心检查。
开启融合泊车系统
方法一:
-
车辆启动后,按压副仪表板融合泊车按键
 ,开启融合泊车系统。
,开启融合泊车系统。
方法二:

- 车辆启动后,点击音响系统应用菜单中的“智能泊车”软按键,开启融合泊车系统。
方法三:

-
车辆启动后,当全景泊车系统激活时,点击音响系统全景泊车界面
图标,开启融合泊车系统。
方法四:

-
车辆启动后,当系统后台找到车位后,会在音响系统主界面状态栏推送
图标,点击
图标开启融合泊车系统。
方法五:
- 通过语音“打开融合泊车”,开启融合泊车系统。
搜索车位
请将车辆保持在侧面距离车位0.5~1.5米的范围内,保持车速不高于20km/h,融合泊车系统将自动进行车位搜索。
也可以选择打开融合泊车系统后,再按照系统提示信息进行车位搜索。
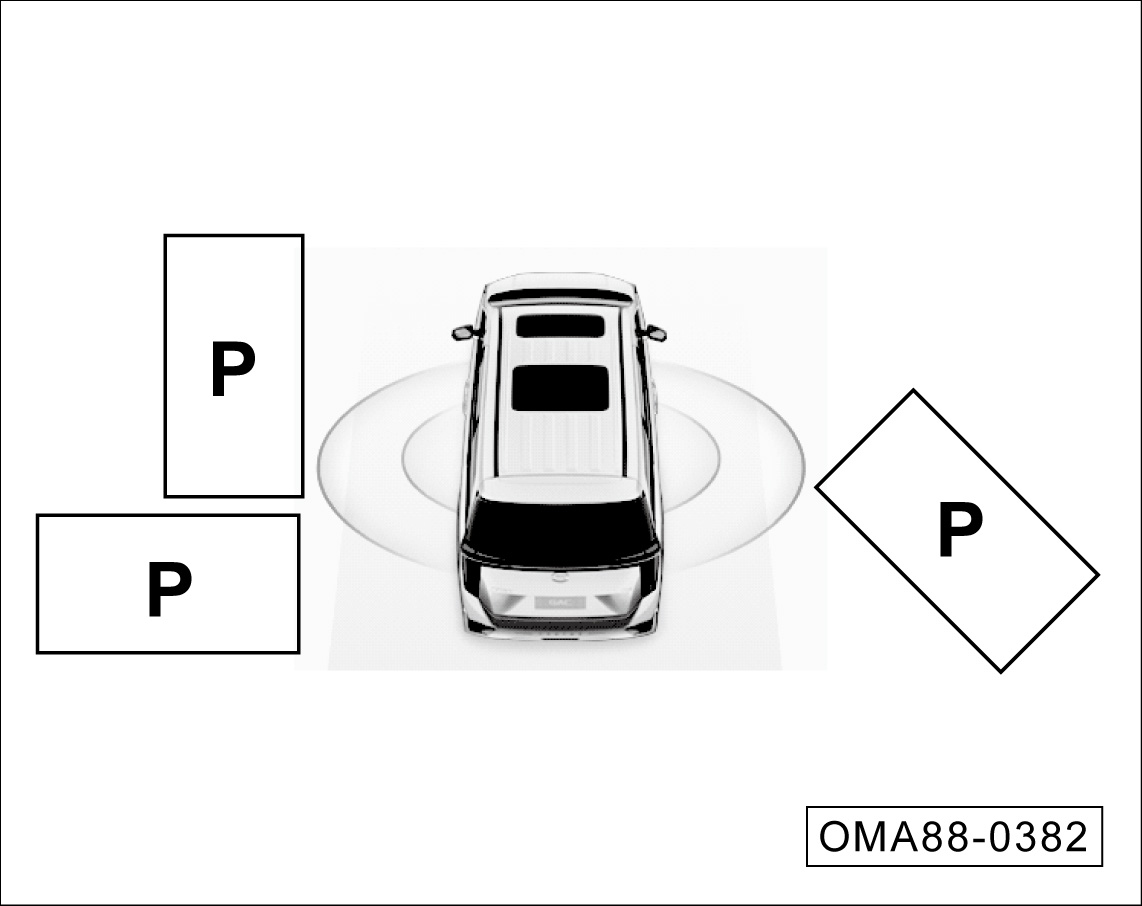
融合泊车系统可支持搜索垂直车位、平行车位、斜列车位。
选择泊出方向
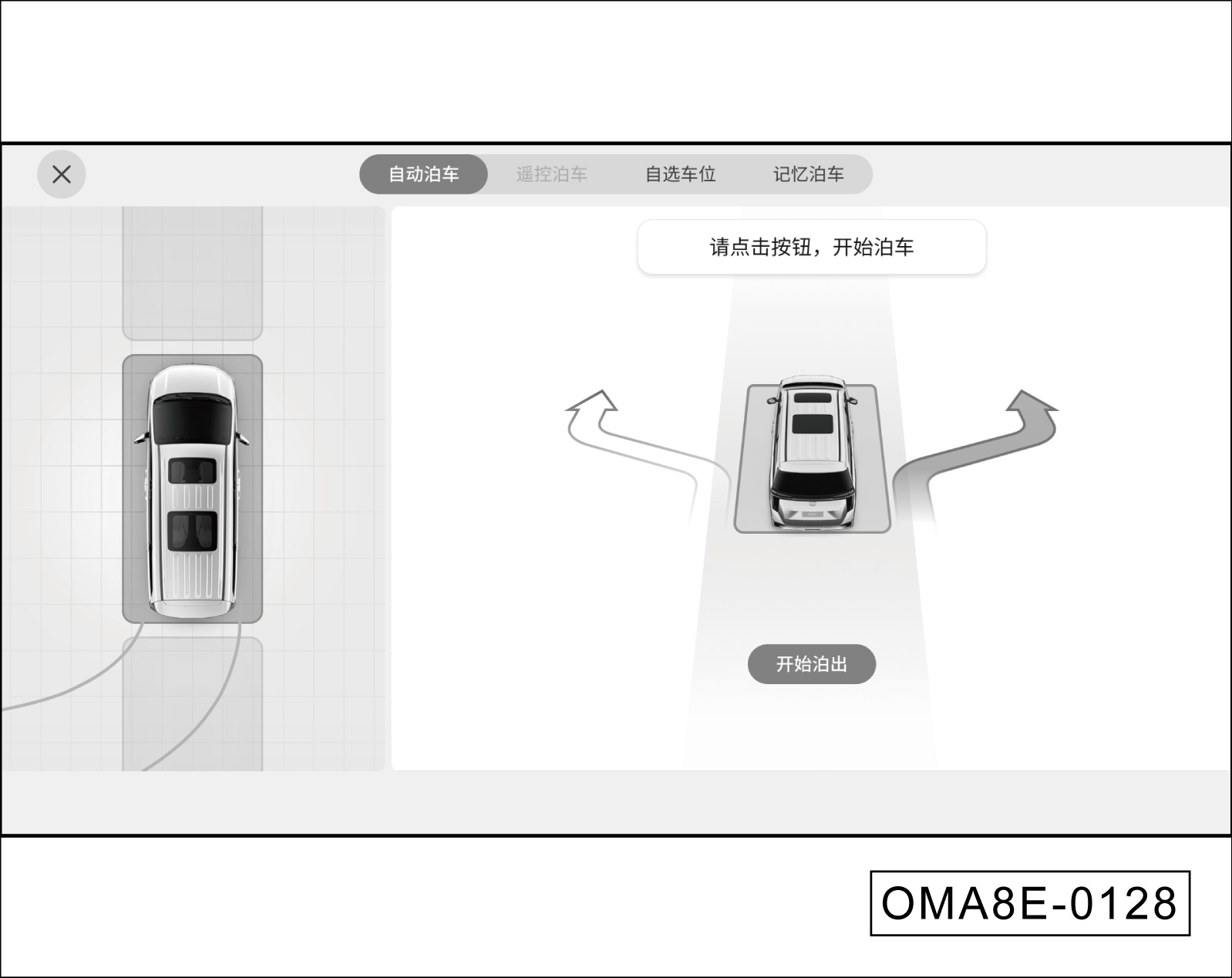
自动泊出功能,只能在车辆静止在水平车位内挂入P挡,且前方1.2m内有障碍物或车辆才可激活。
自动泊出功能,可以通过触屏点击箭头或者打转向灯拨杆选择泊出方向。
- 融合泊车系统分自动泊入和自动泊出功能,由系统自动判断开启功能。
- 由于系统局限性,融合泊车系统并非总能完全搜索到正确的停车位,若未搜索到车位或者搜索到错误的车位,可以重新开启系统尝试。
- 融合泊车系统所需的平行车位长度≥6.5m,所需的垂直车位宽度≥3.2m。
- 搜索车位时车身与车位距离应保持在0.5~1.5m。
- 搜索车位时尽量保持车辆前进方向与车位边界线平行,保持车辆直行。
关闭融合泊车系统
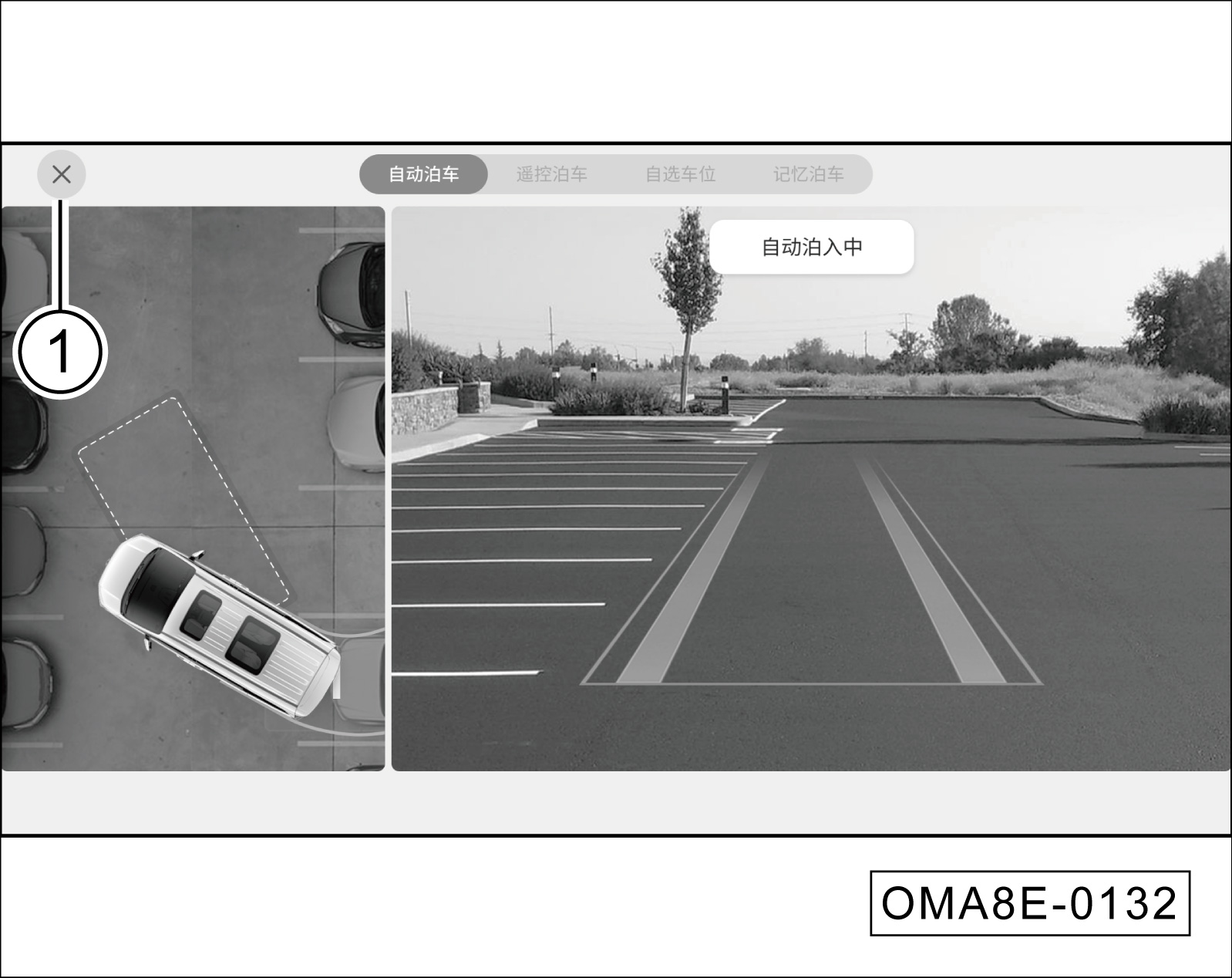
- 点击音响系统融合泊车界面左上角软按键①,关闭融合泊车系统。
暂停融合泊车系统
自动泊车系统激活后,可通过以下任一方式暂停泊车,当暂停条件消失后可继续泊车。

-
按压副仪表板
按键,暂停融合泊车系统。
- 踩下制动踏板。
- 打开除主驾外车门的其他车门。
中断原因
融合泊车系统激活后,包括不限于发生如下情况,将会导致系统中断退出。系统退出后,可选择重新开启系统尝试泊车。
- 解开主驾安全带。
- 打开主驾车门
- 驾驶员打方向盘。
- 驾驶员踩油门踏板。
- 驾驶员操作换挡杆、按P挡键。
- 驾驶员操作电子驻车。
- 前机舱盖打开。
- 暂停超时。
- 暂停次数超限。
- 泊车移动次数超限。
- 泊车总时间超时。
- 泊车空间受限。
- 车辆所处地面坡度过大。
- 车辆无法移动。
- TCS/ABS等系统激活。
- TCS关闭。
- 系统故障等。
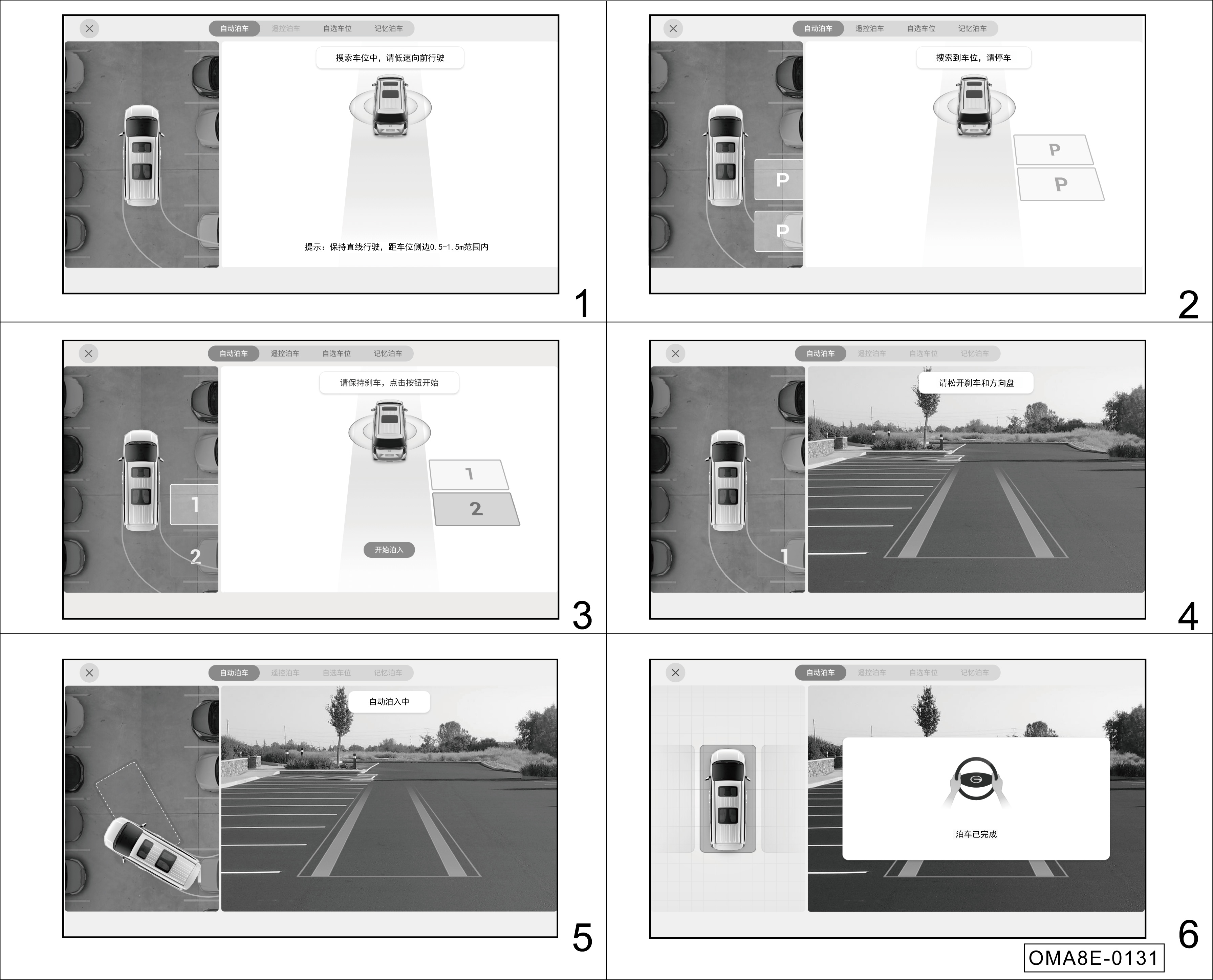
操作说明
以自动泊入为例:
- 车辆启动后,通过泊车开关进入,融合泊车系统会根据当前车辆状态自动选择泊车模式。
- 请按提示行驶搜索车位。
- 车位找到后,请停车并按照提示操作,可以切换不同车位,然后保持刹车,点击屏幕的“开始泊入”激活融合泊车系统。
- 开始泊车后,根据提示松开刹车和方向盘。
- 松开制动踏板和方向盘之后,请等待泊车自动完成,也可以手动选择退出。激活过程,请驾驶员注意周围环境,随时准备接管车辆。
- 泊车完成。