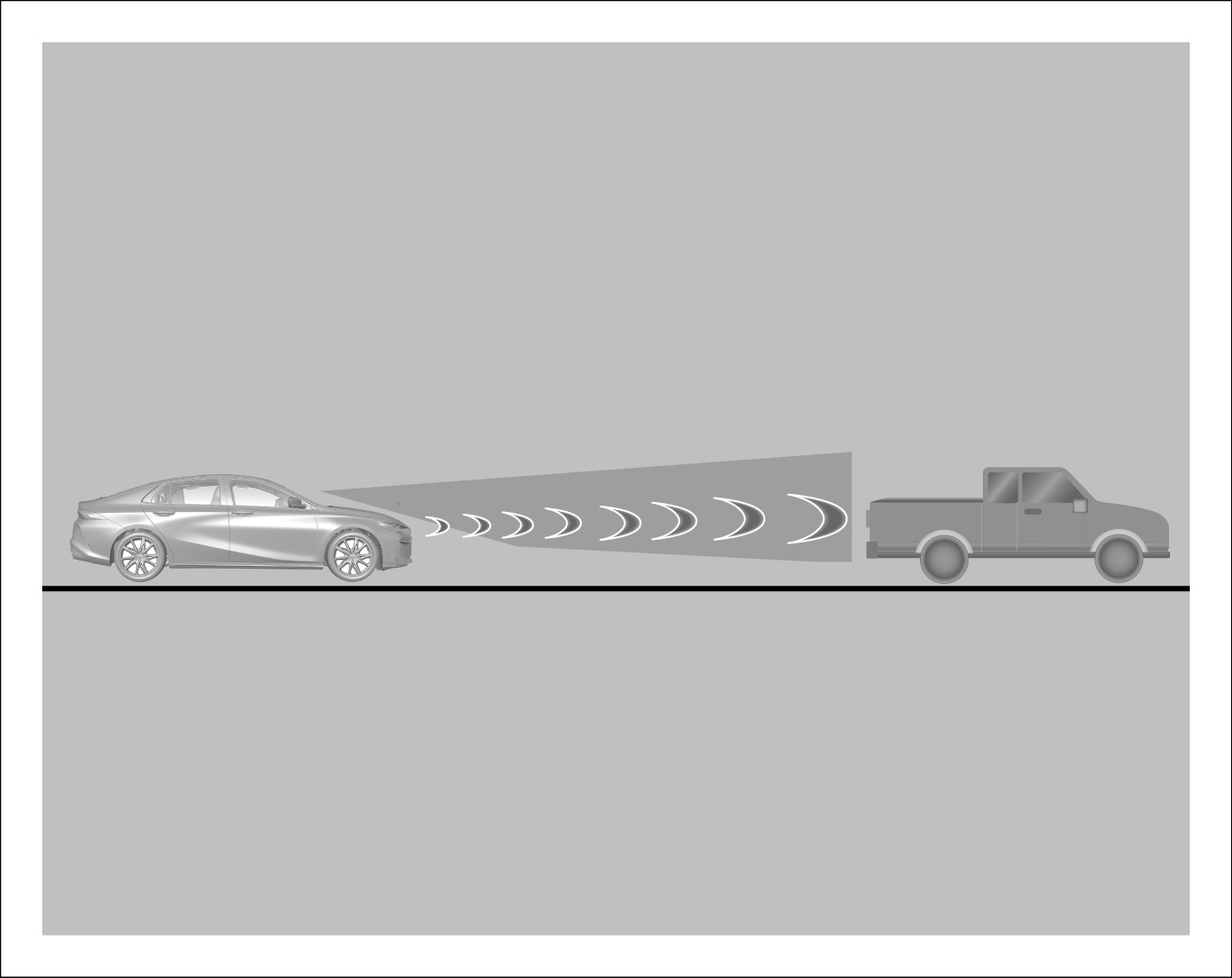
自适应巡航控制系统简称为ACC,可以在定速巡航时自动调节与前车的跟车距离,可应用巡航车速0~130km/h。
ACC根据安装在车辆前部的毫米波雷达和前风窗玻璃上的智能前向摄像头,探测同一路径的前车和本车之间的相对距离和速度:
-
前方有车时,若前车停车,ACC控制本车跟随前车自动停车;若前车起步,ACC控制本车在特定条件再次起步行驶。在跟停特定时间之后,简单操作
 按键或油门踏板即可实现跟随起步行驶。
按键或油门踏板即可实现跟随起步行驶。
- 前方有车且其车速低于驾驶员设定的目标车速时,ACC控制本车与前车保持安全距离跟随行驶。
- 前方无车时,ACC控制本车以驾驶员设定的目标车速定速行驶。
雷达和摄像头传感器使用的注意事项。 雷达和摄像头传感器*
- ACC不是一个安全系统、障碍物探测器、碰撞警告器或者防碰撞系统,而是一个舒适型系统,驾驶员必须一直保持对车辆的控制并且对车辆负有全部责任。
- 务必根据当时的能见度、天气状况、道路及交通状况谨慎使用ACC系统,驾驶员必须一直保持控制车辆,并对本车车速和与其它车辆的距离负全部责任。
- ACC系统不能替代驾驶员的注意力与判断决策。驾驶员需要始终负责确保车辆以适当车速安全行驶,与其他车辆保持适当距离。
操作按键
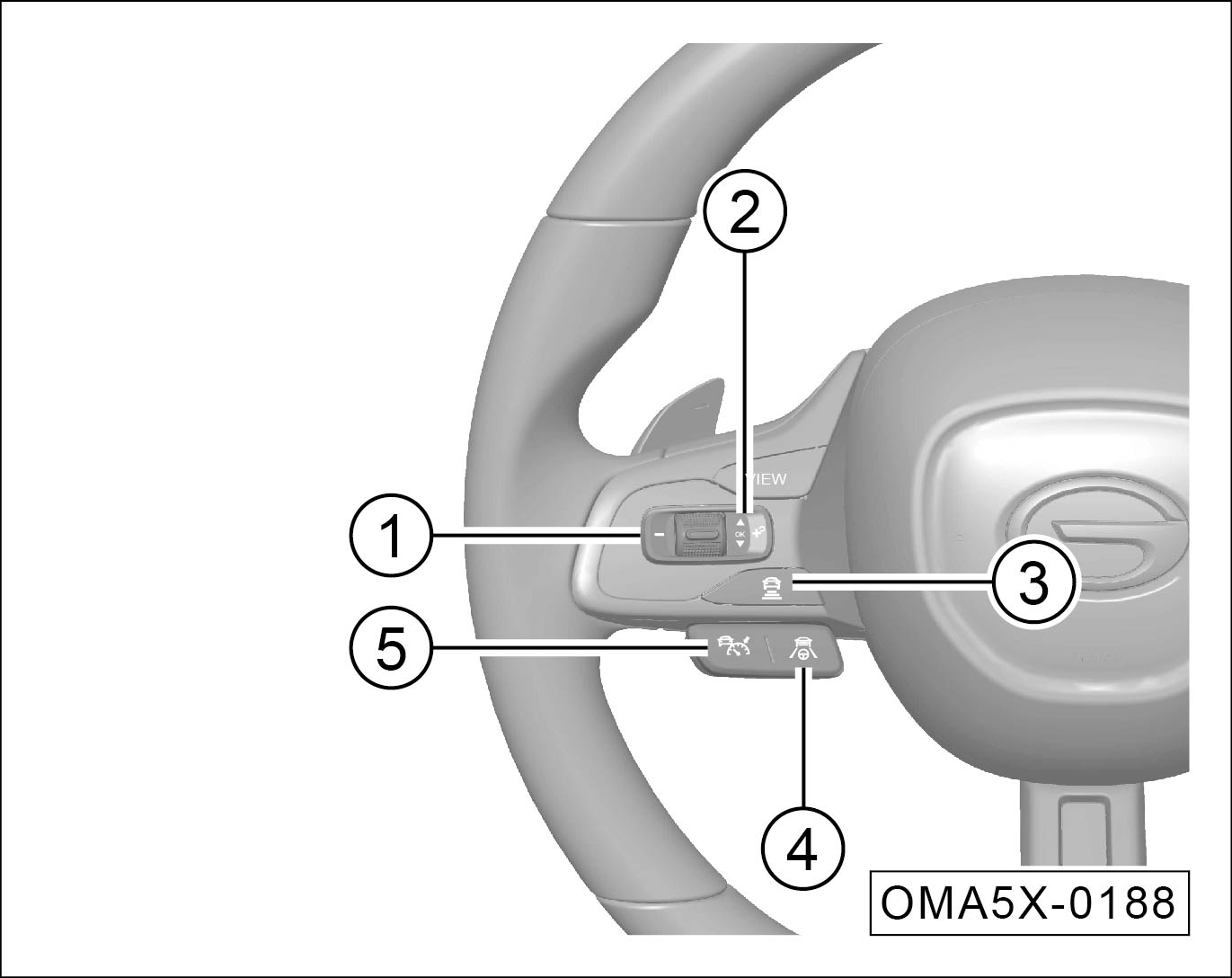
①
 :减速键
:减速键
②
:恢复/同步/加速键
③
 :调整车距时距
:调整车距时距
④
 :启动关闭ICA/切换至ICA
:启动关闭ICA/切换至ICA
⑤
 :启动关闭ACC/切换至ACC
:启动关闭ACC/切换至ACC
界面说明
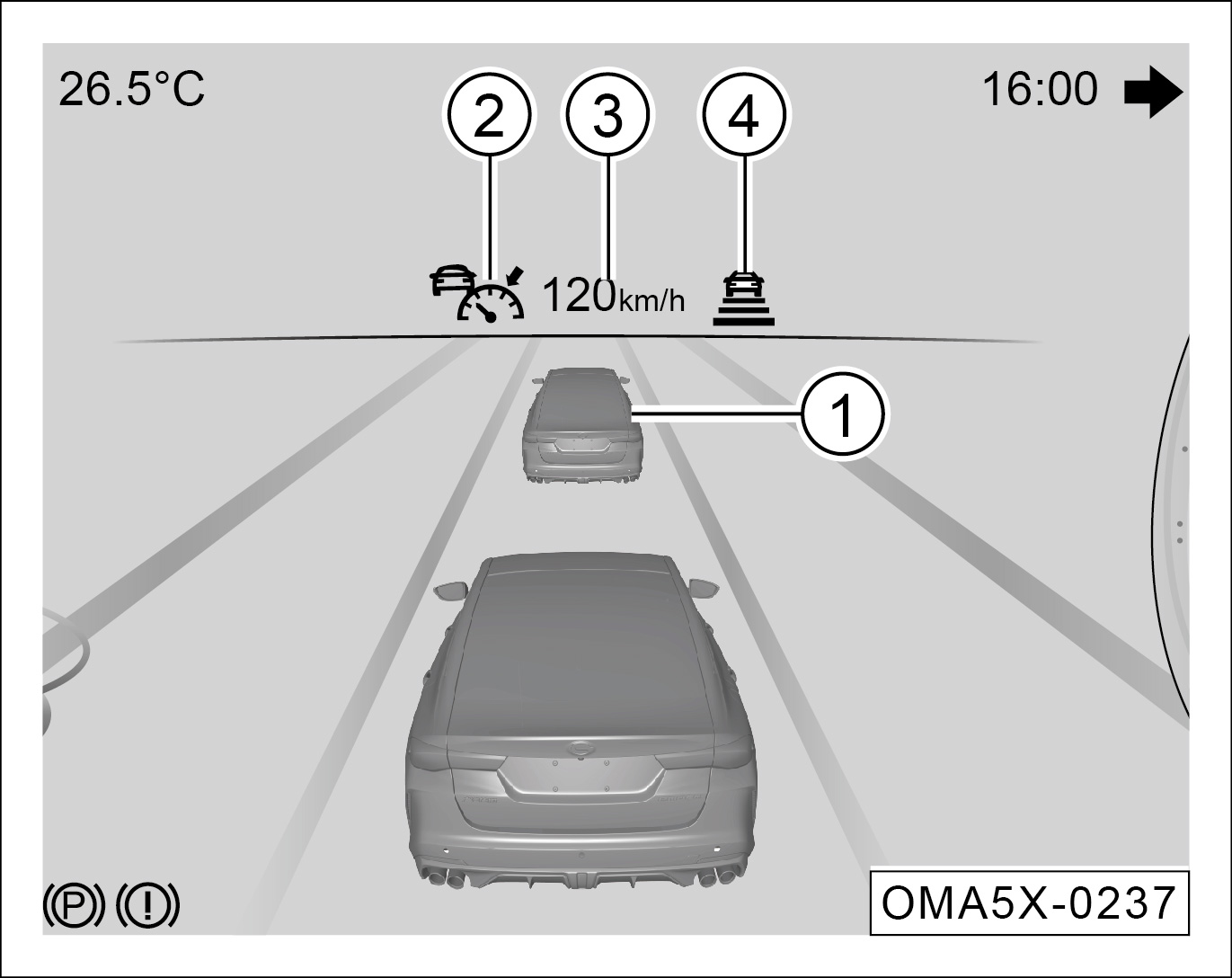
① 表示探测到的前方车辆。
② 自适应巡航指示灯:
-
绿色自适应巡航指示灯
点亮表示ACC处于激活状态,前方有目标车。白色自适应巡航指示灯
点亮表示ACC未激活,前方有目标车。
-
绿色自适应巡航指示灯
 点亮表示ACC处于激活状态,前方无目标车。白色自适应巡航指示灯
点亮表示ACC正在工作,前方无目标车。
点亮表示ACC处于激活状态,前方无目标车。白色自适应巡航指示灯
点亮表示ACC正在工作,前方无目标车。
-
 黄色点亮表示ACC存在故障,应及时前往广汽传祺特约店进行检修。
黄色点亮表示ACC存在故障,应及时前往广汽传祺特约店进行检修。
③ 表示上次设置的巡航车速。
④ 设定的与前方车辆的巡航时距。
当ACC制动能力不足以使本车与前车保持合适的距离时,系统会发出“驾驶员接管请求”,组合仪表显示报警信息,同时发出声音,此时驾驶员应按系统要求踩制动踏板以降低车速。
启动ACC
-
短按
按键,仪表中相应绿色指示灯点亮,车辆进入ACC控制状态。
- 可设置的最低巡航速度为30km/h。
- 挡位在非前进挡时,无法进入ACC控制。
以下动作可以退出ACC控制:
- 打开驾驶员侧车门。
- 解开驾驶员侧安全带。
- 踩下制动踏板。
- 挡位处于非前进挡。
-
短按
键(组合仪表相应的指示灯熄灭,退出ACC,且清除设定的速度)。
- 操作EPB系统按键。
- 关闭ESC系统。
以下退出自适应巡航方式按
键可恢复:
- 踩下制动踏板时(需松开制动踏板)。
- 挡位处于非前进挡(需挂入前进挡)。
- 挡位切换至非前进挡(需将挡位切换至前进挡)。
- 操作EPB系统按键(需将EPB系统释放)。
- 关闭ESC系统(需重新将ESC开启)。
恢复ACC
组合仪表相应的指示灯为白色时,可通过以下操作重新设定自适应巡航功能:
-
短按
键,组合仪表相应的指示灯绿色点亮,车速将恢复到上次巡航设定速度记忆值并进入巡航控制状态。
- 若尚未储存巡航车速,系统会将当前的车速设定为巡航车速(当前车速小于30km/h,会将巡航车速设为30km/h)。
提高巡航车速
若想提高车速,请执行以下操作:
-
踩下油门踏板,提高到目标车速并按
键,即以较高设定速度巡航。
-
短按
键,每按一次车速提高5km/h。
-
长按
键,巡航车速以5km/h持续增加,直至松开按键。
- 可设置的最高巡航速度为130km/h。
- 当踩下油门踏板加速时,车辆将暂时退出ACC巡航控制,并以驾驶员意图加速。松开油门踏板后车辆将恢复ACC巡航控制以及设定的巡航速度。
降低巡航车速
若想降低车速,请执行以下操作:
-
短按
键,每按一次车速降低5km/h。
-
长按
键,巡航车速以5km/h持续降低,直至松开按键或者巡航车速等于30km/h。
-
巡航过程中,轻踩制动踏板(ACC退出),保持制动至目标车速,短按
键,即可以按当前车速巡航。
-
巡航过程中,按下方向盘
键(ACC退出),滑行或轻踩制动至目标车速,短按
键,即可以按当前车速巡航。
调整ACC跟车时距
通过短按
键,可切换与前车距离的挡位,按一次切换一挡,以“第四挡→第三挡→第二挡→第一挡→第四挡……”的顺序循环切换。同时,组合仪表显示屏中将显示与挡位数量相同的横条。
跟停后激活ACC
跟随前车的过程中,前车停止,本车也将停止。在本车跟停一段时间内,ACC会通过ESC主动增压保持本车静止;在一段时间之后,ACC会通过启动EPB保持车辆静止。当前车驶离时,本车ACC激活为三种情况:
-
若自适应巡航指示灯
为绿色,在前车驶离后,ACC可主动恢复并重新驱使车辆。
-
若白色自适应巡航指示灯
点亮,仪表显示“巡航等待中”且EPB未启动,驾驶员可通过踩加速踏板或者按
键,可恢复ACC并重新驱使车辆。
-
若白色自适应巡航指示灯
点亮且EPB启动,驾驶员可通过先踩油门踏板,或者按
键,可恢复ACC并重新驱使车辆。
ACC受物理规律限制,有一定的系统局限性,某些行驶环境下,驾驶员可能感到ACC反应滞后或未能如期对车辆实施控制,故驾驶员必须随时准备自行操控车辆。
下列情况会影响毫米波雷达系统传感器功能,遇到这些情况时驾驶员必须特别警觉:
- 减速停车。若前方车辆紧急制动停车,则ACC也随之减速或提示接管请求,驾驶员要根据接管请求报警主动干预制动,使车辆完全停下。
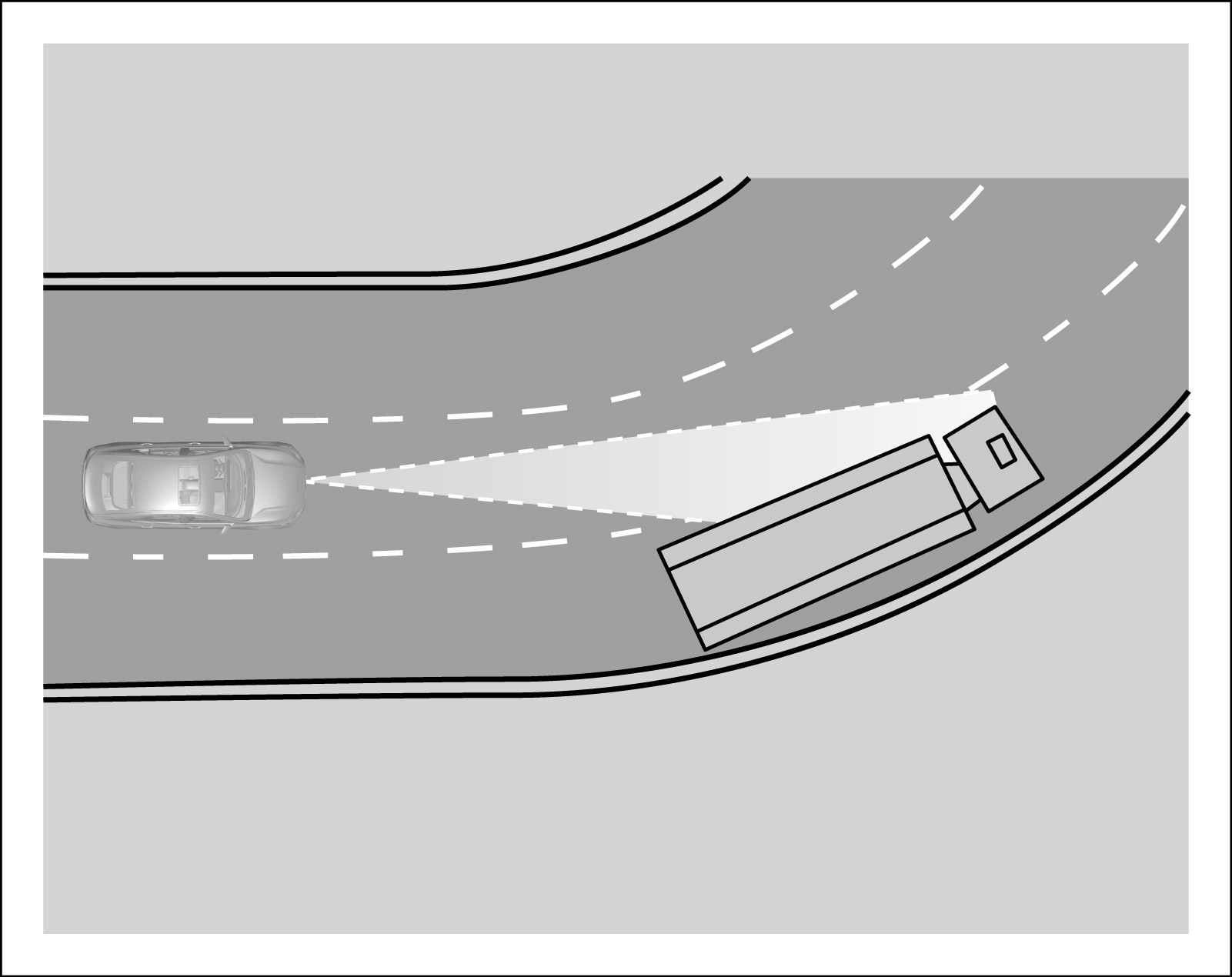
- 驶经弯道。驶经弯道时毫米波雷达传感器可能捕捉不到前方车辆,或可能不能对相邻车道的车辆作出反应。这种情况下ACC可能对前方车辆施加制动,降低车速,或对前方车辆无反应,踩下制动踏板或手动取消ACC即可退出ACC系统。
- 驶出弯道。驶出长弯道时,因为系统将预先计算行车道,所以毫米波雷达传感器可能会对相邻车道上的车辆作出反应而对本车制动。此制动过程可通过踩下油门踏板来中断。
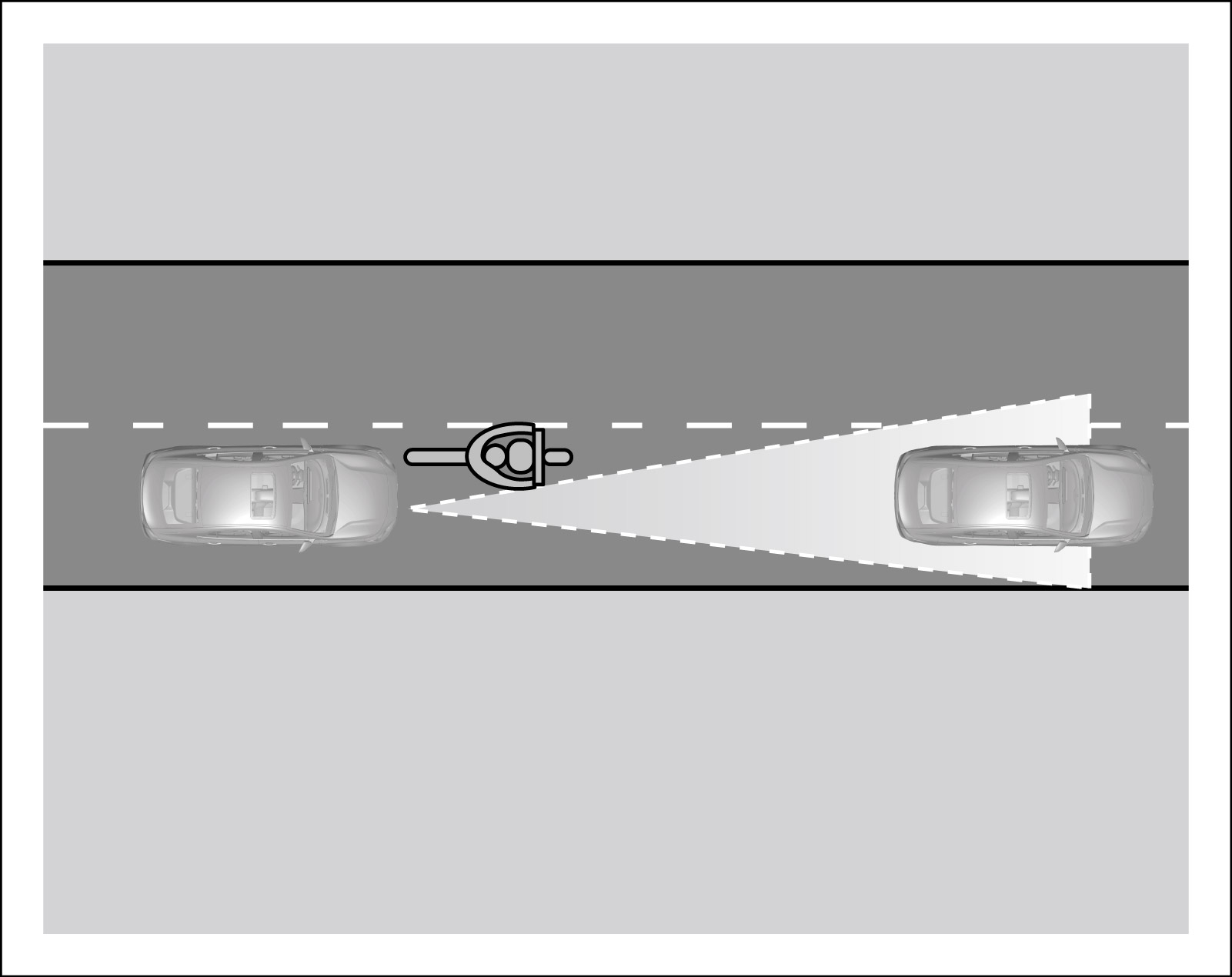
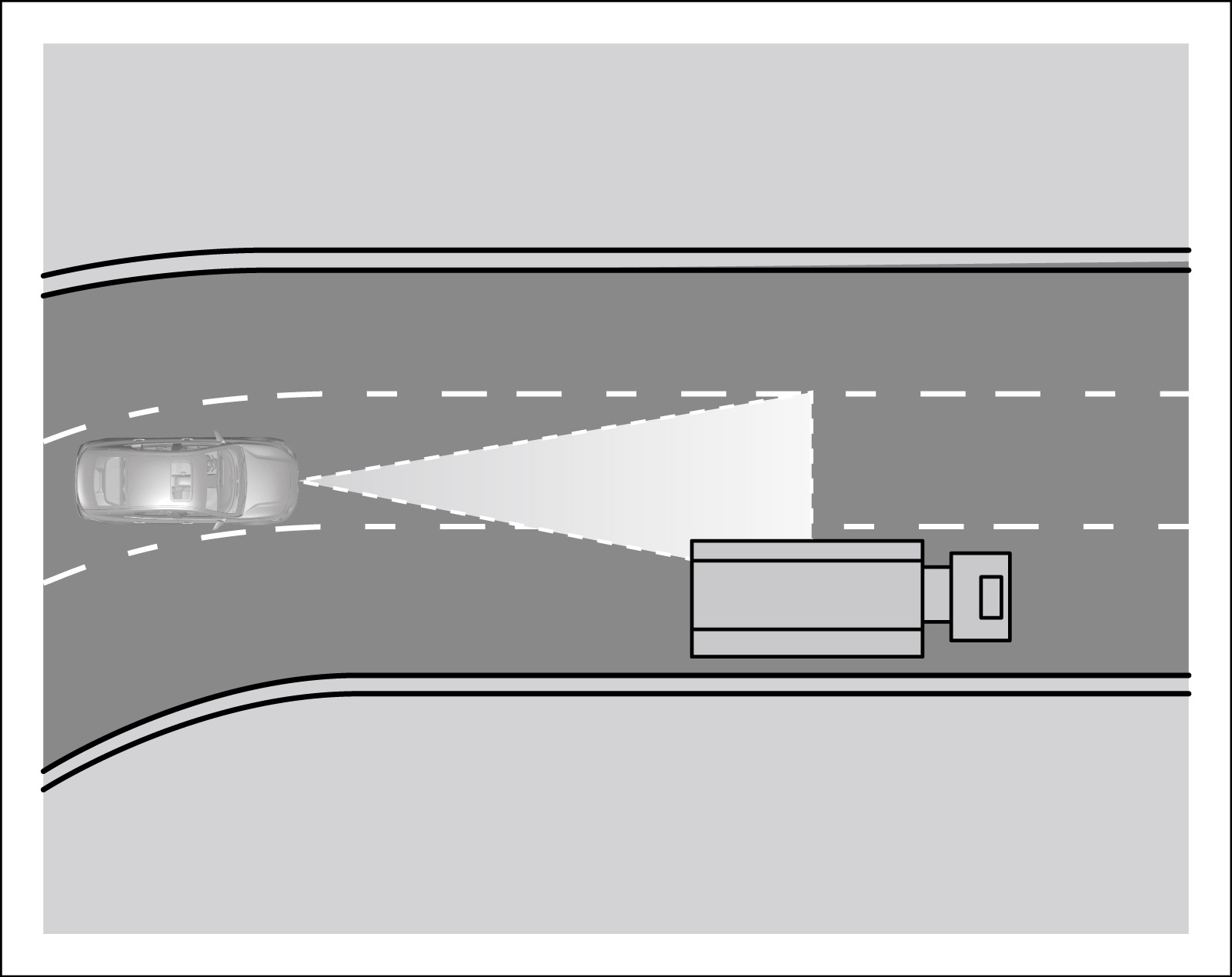
- 前方狭窄车辆及Z形车流。前方狭窄车辆、或左或右行驶的前方车辆进入毫米波雷达传感器探测范围时传感器才能被识别,系统无法识别处在传感器探测范围外的车辆。ACC系统不易识别摩托车等狭窄车辆,同时,ACC系统对改装的车辆和不规范运输的车辆存在无法准确识别前车距离的风险,不建议将此类车辆作为前方目标车辆。
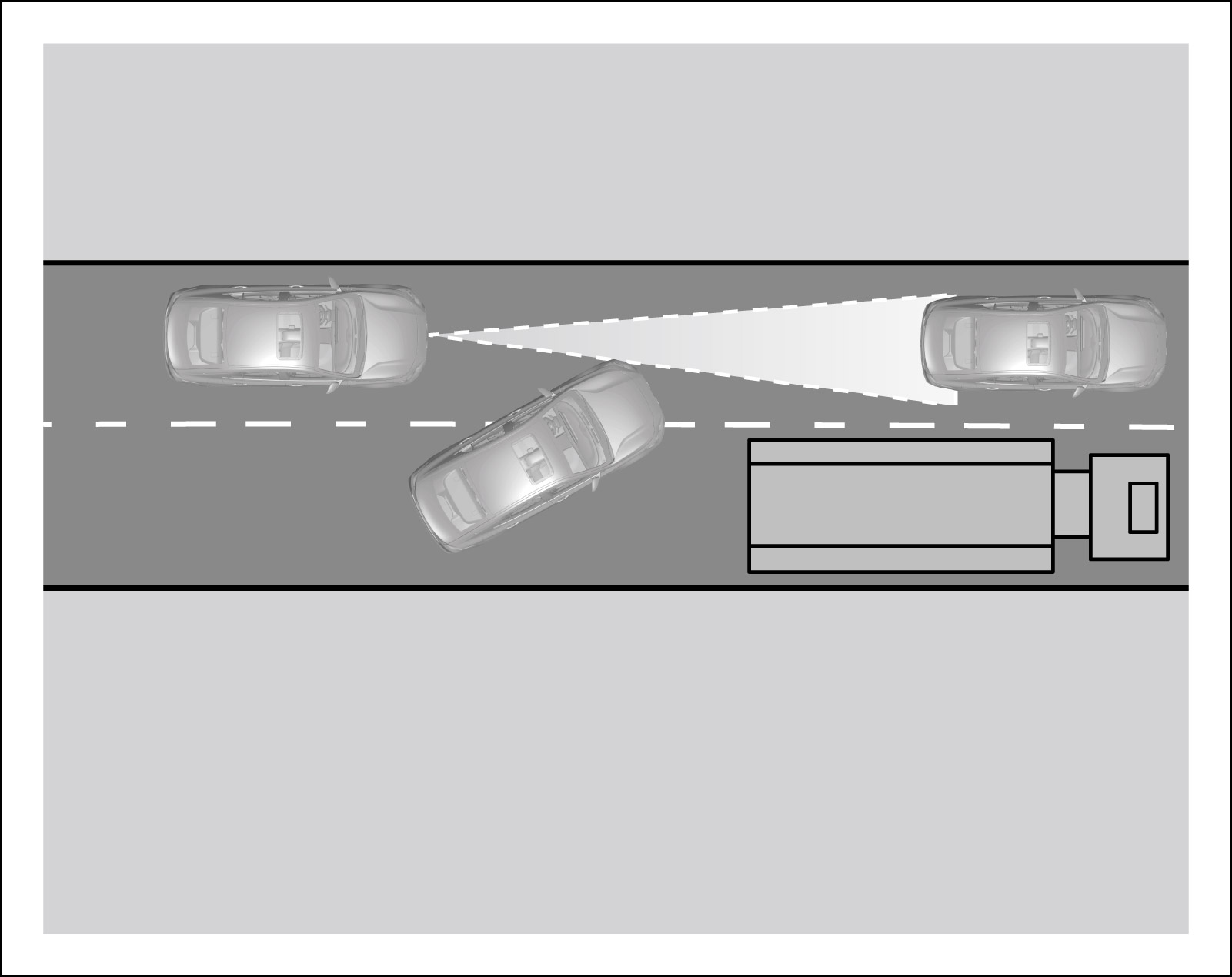
- 其它车辆变换车道时。相邻车道里的车辆并入您所在车道时,如该车未进入车前探测范围,毫米波雷达传感器可能探测不到该车,从而导致ACC反应滞后。
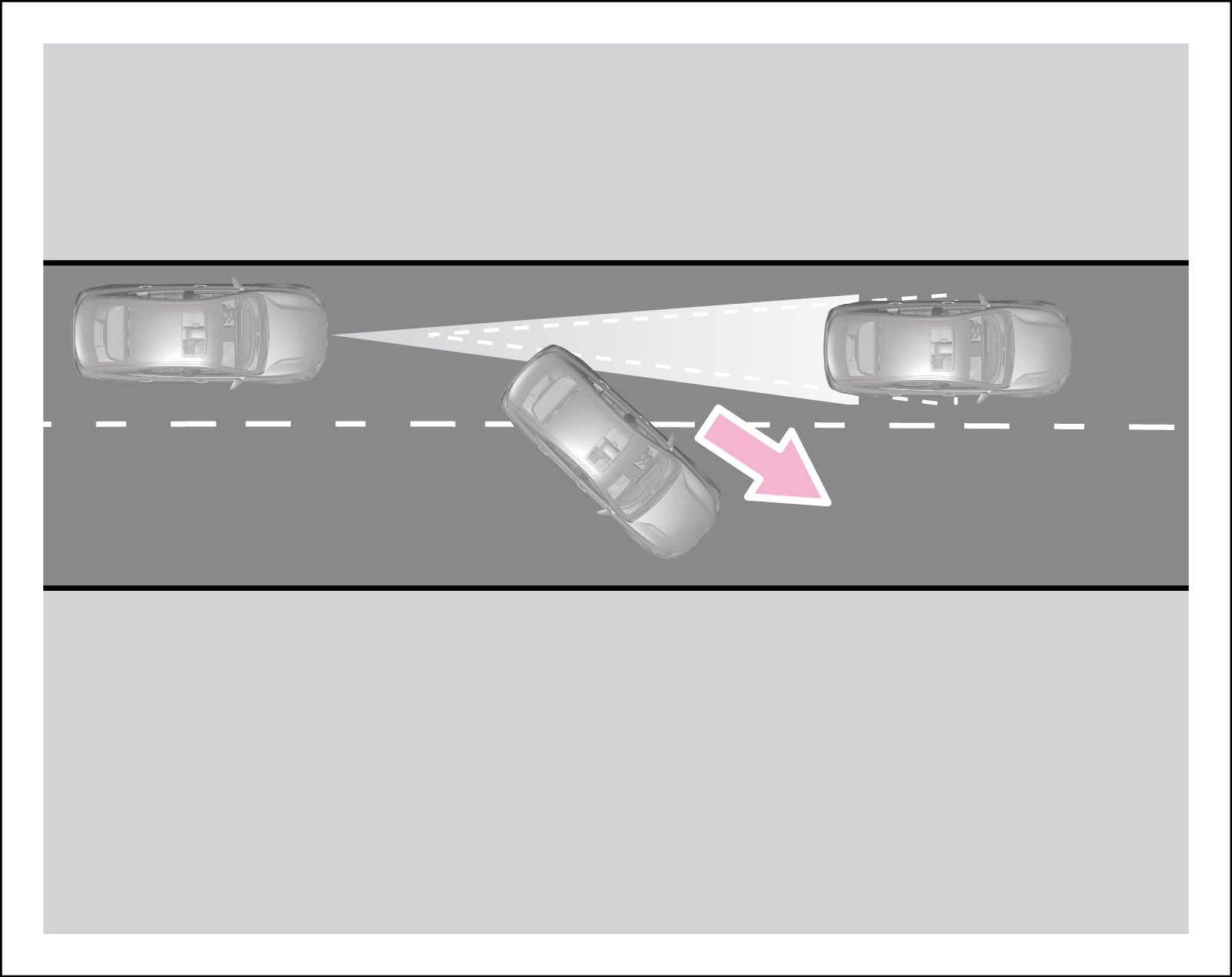
- 前方目标车突然切出,近距离出现一辆静止的车辆,毫米波雷达传感器及制动执行器反应滞后,出现制动响应不及时问题。
- 可能恶化传感器功能的影响因素。
-
暴雨、水雾、冰雪或污泥均可能恶化毫米波雷达传感器的功能,导致ACC暂时关闭,同时,组合仪表显示器显示下列文本信息:“巡航系统工作条件不满足”或者“前碰缓解系统关闭”。此时自适应巡航控制系统和前碰缓解系统无法发挥作用。
-
低温、高寒地区因为温差或霜冻,前风窗玻璃起霜起雾,造成智能前向摄像头传感器被遮挡,组合仪表显示器会提示下列文本信息:“巡航系统工作条件不满足”或者“前碰缓解系统关闭”。此时自适应巡航控制系统和前碰缓解系统无法发挥作用。
- 制动器过热。如制动器因紧急制动或车辆沿陡坡下行时过热,ACC将暂时自动关闭,同时,组合仪表显示器显示下列文本信息:“巡航系统工作条件不满足”。此后,不能再激活ACC。当制动器温度降低至合理程度时方可重新激活ACC。
- 在城市交通拥堵、能见度较差(夜间/逆光/雨/雪/浓雾等)时,不宜使用ACC。ACC系统对人或动物、狭窄车辆如自行车和摩托车或电瓶车、低架拖车、接近的或静止的车辆、低速或静止的卡车/小皮卡有可能不会采取制动措施,驾驶员需要特别警觉,时刻准备接管车辆。
- ACC功能不能覆盖全部驾驶情景和交通、天气及道路情况。
- ACC功能仅为补充驾驶辅助功能。即便使用,该功能也不能替代您的注意力和判断力。您有责任保持安全的距离和速度,并且,如果ACC未能保持适当的速度或与前车保持适当的距离,则您必须进行干预。
- ACC的接管提示报警仅警示其毫米波雷达及智能前向摄像头传感器已经检测到的车辆,因此可能不会发出报警,或者发出报警时会有一定延时。切勿等待发出报警,在情况需要时施加制动。
- 为安全起见,在市区行驶、交通拥挤、道路多弯和路况不良(例如结冰、有雾、布满碎石、大雨滂沱和容易发生滑水现象)等情况下,不允许使用ACC,有发生事故的危险。
- ACC不属于防撞系统。若距前车越来越近,并且车速高于前车,ACC的制动效应已不能确保安全,可能与前车相撞时驾驶员必须踩制动踏板降低车速。
- 在无路地区或土路上行驶时切勿启用ACC,只可在沥青、水泥等平整铺装路面上启用ACC。
- 本车与前方车辆车速相差较大。
- 在不同车道上行驶、变更车道或较小半径的弯道行驶。
- 行人、动物、自行车、三轮车、静止车辆等或意外的障碍物。
- 复杂的交通状态。
- 对面来车或交叉行车。
- 低矮拖车、卡车或特征不规则/不规范的车辆。
因此,务必小心注意交通状况并作出相应反应,切勿等待系统识别目标或系统自身制动,在情况需要时施加制动。
- 切勿磕碰毫米波雷达传感器。若因磕碰导致传感器错位,即使经过维修校正,仍会恶化系统性能,甚至导致系统关闭。
- 如果毫米波雷达或智能前向摄像头传感器表面脏污或被暴雨、冰雪、泥浆等覆盖,则ACC可能无法发挥作用,仪表显示器提示“请检查巡航系统”。清洗传感器表面脏物后,功能会重新恢复正常。
- 请勿随意对前保险杠喷涂车漆,喷涂后可能会引起前向毫米波雷达性能下降。
- ACC对横向穿越或在同一车道驶向本车的人员、动物及车辆不会做出反应。
- 在经过十字路口、减速带、陡峭路面、斑马线或在变换车道、高速公路出入口及匝道或施工路段行驶时,需要退出ACC系统采用全人工驾驶,以免在这些情况下车辆自动加速到设定车速引发交通事故。
- ACC系统在车辆短暂停止或者获得驾驶员的确认(控制按键者或油门踏板)后能够使车辆自动驶出,在这段时间内驾驶员必须保证在车辆的正前方没有障碍物或者其他交通参与者,如行车/两轮车。
- 若ACC未能正常发挥作用,切勿继续使用,建议及时前往广汽传祺特约店进行检修。
- ACC在某些情况下可能无法反应。例如,车辆接近抛锚的车辆或因堵车等待的车辆等静止障碍物,或在同一车道行驶的车辆接近本车时系统可能无反应。
- ACC只能实现有限的制动力,不能实现紧急制动。
- 不要在无意中将脚放在油门踏板上,否则会使ACC不再对本车进行制动。因为驾驶员踩下油门踏板加油可能会使车速和距离控制过量。
- 车辆在暴雨、雪天行驶,系统难以或根本无法识别前方车辆时,应关闭ACC。
- ACC处于开启状态时,组合仪表显示屏显示的ACC状态可能被其它功能(例如,电话呼叫时)覆盖。
- 激活ACC后系统自动对车辆施加制动时,会出现不同于人工制动的声音,或者制动踏板自动下压,此属正常现象。此声音和踏板作动是由制动系统运转造成的,无需担心。
- 为安全起见,关闭整车电源后会删除已存储的巡航速度。
- 您可以随时踩下油门踏板提高车速。松开油门踏板后,该系统会将车速重新调回此前已存储的车速。
- 进入隧道,可能会使毫米波雷达和智能前向摄像头进入失明模式,ACC可能会暂时关闭。